
感應型無軸承電機的優化氣隙磁場定向控制
核心提示: 無軸承電機是電磁軸承與交流電機相結合的產物,它將產生徑向磁懸浮力的電磁軸承繞組嵌放進旋轉電機的電樞鐵心中,使得電機轉子同時具有旋轉和自懸浮支撐的能力,有效地解決了電機同時實現高速與大
核心提示: 無軸承電機是電磁軸承與交流電機相結合的產物,它將產生徑向磁懸浮力的電磁軸承繞組嵌放進旋轉電機的電樞鐵心中,使得電機轉子同時具有旋轉和自懸浮支撐的能力,有效地解決了電機同時實現高速與大容量化的理論基
無軸承電機是電磁軸承與交流電機相結合的產物,它將產生徑向磁懸浮力的電磁軸承繞組嵌放進旋轉電機的電樞鐵心中,使得電機轉子同時具有旋轉和自懸浮支撐的能力,有效地解決了電機同時實現高速與大容量化的理論基礎和技術關鍵,開拓了比電磁軸承更為廣泛的應用前景。為實現轉子的穩定懸浮,必須對徑向磁懸浮力進行有效控制,但懸浮力與電磁轉矩之間、垂直與水平懸浮力之間存在耦合。由于磁懸浮力是無軸承電機轉矩繞組與懸浮繞組產生的氣隙磁場有源不平衡的結果,因而必須采用氣隙磁場定向控制才能實現解費和確保穩定懸浮運行。
國內外已有不少對感應型無軸承電機氣隙磁場定向控制進行過研究,這種控制方式能在負載下、動態中實現轉子的穩定懸浮,但不能實現兩垂直方向懸浮力的完全解耦。進一步的分析表明,懸浮力的完全解耦不是發生在準確的氣隙磁鏈定向方式下,而是在氣隙磁鏈矢量與定子磁鏈矢量之間某一磁鏈矢量上定向時才可獲得,這意味需要通過對氣隙磁鏈矢量實行幅值和相位的實時修正。文提出了一種通用磁場定向控制器的概念,它可通過設定參數'V/“來設置定向磁通矢量的位置,以適應現有的任何一種磁場定向控制方式。這些研究雖然敏銳地提出了問題,但沒有運用這些思想構成無軸承電機實現完全解耦的解決方案,更未進行針對轉子參數變化、電機鐵磁非線性飽和影響的運行分析和對策研究。
為深化、實現這一解耦控制思想,本文首先建立起感應型無軸承電機氣隙磁場定向控制模型,進行穩定懸浮運行仿真。針對無軸承電機實際存在鐵磁非線性飽和、大動態及過載下轉子參數變化的實際工況,本文通過非線性建模及仿真,指出必須對定向氣隙磁鏈實現幅值和相位的修正,進而提出了優化氣隙磁場定向的新穎動態解費控制策略。同時還提出了基于通用磁場定向控制器的優化氣隙磁場定向控制系統結構,解決了運行中跟蹤和動態調整定向磁通矢量的實現技術,為感應型無軸承電機穩定懸浮所需的非線性動態解耦控制提供了實現途徑。
2氣隙磁場定向控制2.1概述為感應型無軸承電機磁懸浮力產生原理示意圖,其中1和褚為4極轉矩繞組,和為2極懸浮繞組。如果按圖示極性給各繞組通入相應電流,則2極磁場將與4極磁場相疊加,致使區域1氣隙磁密增加、區域2氣隙磁密減少,不平無軸承電機磁懸浮力產生原理圖衡的氣隙磁通密度使電機轉子上承受了沿方向的磁懸浮力,促使轉子上浮。為實現對懸浮力的精確控制,關鍵是建立實現無軸承電機系統解耦的氣隙磁場定向控制模型,包括懸浮力模型和轉矩模型。2.2懸浮力模型根據文,若不計轉子偏心影響,感應型無軸承電機在氣隙磁場定向下水平和垂直兩正交方向上磁懸浮力。可表示為為4極氣隙磁場與轉矩繞組交鏈的磁鏈;i4,為轉矩繞組的勵磁電感,/.4,為轉矩繞組勵磁電流幅值;/2l/、/2l/分別為懸浮繞組在同步速么《坐標系中分量電流;r為轉子外徑;/為電機有效鐵心長度;叫、處分別為轉矩繞組和懸浮繞組每相串聯有效匝數;戈為平均氣隙長度。
由此可見在氣隙磁場定向條件下,憑據懸浮繞組的分量電流就可獨立地控制兩垂直方向的磁懸浮力。這樣,在無軸承電機懸浮控制中可以通過檢測轉子位移來生成懸浮力值,再按下式計算出懸浮繞組的電流2.3轉矩模型同步速么9坐標系中表示的感應型無軸承電機轉矩繞組電壓方程為與轉子間每相互感;⑴為電源角頻率;叫為轉速角頻率;D=d/d/為微分算子。下標么為轉矩繞組么3軸分量,*V、/為定、轉子量。
轉矩繞組產生的氣隙磁鏈巧,可表示為在氣隙磁場定向條件下由此可得將式(6)代入式(3)第三、四行,分別得到/2=i2-M;2;=i,。/i,。為轉子時間常數;(=出-叫為滑差角頻率,=電機轉矩方程為計及式(6)的關系=普D屮‘則Us可見在氣隙磁場定向條件下,調節轉矩繞組g軸電流可獨立地控制電磁轉矩,實現電磁轉矩與懸浮力之間的解。氣隙磁場定向下的轉矩控制原理如所示。
影響,對附錄中的感應型無軸承電機進行了氣隙磁場定向矢量控制下的運行仿真。其中磁懸浮力解析模型式(1)的正確性已采用電機電磁場專用設計軟件ANSOFT進行了有限元的分析和驗證。
為無軸承電機空載起動過程轉子辨由方向位移的變化,設靜止時初始氣隙偏心為AFA;0=O.3mm.從(a)、(b)看出,起云力時轉速《迅速從靜止升至1420r/min,轉速超調量小于0.6%,轉速穩態誤差小于0.3r/min.在氣隙磁場定向控制下轉子獲得了穩定懸浮,々方向位移穩定在±60|im范圍內。(c)、(d)分別為氣隙磁鏈幅值及其相位%,變化,相位角指實際氣隙磁鏈與定向用氣隙磁鏈之間的相位偏差。
3轉子參數及鐵磁飽和對懸浮的影響以上運行仿真是基于無軸承電機的理想工況,但在實際運行的加速、加載或過載中,負載突增引起電機轉差增大,轉子回路運行頻率上升,集膚效應的影響會使轉子電阻增加、轉子漏感變小,轉子電流增大,致使電機飽和程度增加。這些運行中的實際因素都會影響無軸承電機動態中的懸浮性能。
為轉子電阻增大1.5倍、轉子漏感減小20%、轉子時間常數減小將近一半時,電機突加5N+m額定負載轉子方向位移的變化。可以發現負載后,轉矩繞組產生的氣隙磁場幅值增大為原來1.28倍,相移了0.16rad,即實際氣隙磁鏈向轉子磁鏈方向偏移,破壞了原有的氣隙磁場精確定向,致使轉子位移由±60|jm增大到±160|jm.為考察鐵磁非線性飽和對懸浮性能的影響,給出了通過ANSOFT軟件電磁場計算求得的樣機氣隙磁密與轉矩繞組勵磁分量電流的非線性關系曲線,額定運行點在勵磁電流/4,=2.8A、氣隙磁密1.2T處。根據這個非線性關系和式(1)的懸浮力計算公式,求得a、方向懸浮力表達為出,當懸浮繞組電流增大后,由于直接飽和的影響,氣隙磁密增幅減小,懸浮力不再與電流成正比增大。最大懸浮力出現在勵磁電流/4,=2.8A時,若勵磁分量電流進一步增大,懸浮力還會下降。
計算了不同轉矩繞組勵磁分量電流/4,下,氣隙磁鏈受轉矩分量電流/,的影響。可以看出,氣隙磁鏈隨轉矩分量電流/,的增大而減小,在較大的勵磁電流/4,下,氣隙磁鏈下降的速率變緩。這是由于q軸轉矩電流增大后,交叉飽和程度進一步提高,使得在同樣的勵磁分量電流下軸氣隙磁鏈隨轉矩分量電流的增加而減小,此外氣隙磁鏈的方向還會隨轉矩分量電流的增加而發生改變,顯然這都將導致磁懸浮力減小,影響電機穩定懸浮運行。
ANSOFT軟件求得的轉子懸浮力F與轉矩繞組勵fe分量電流/4m、懸浮繞組電流/2的關系。可以看無軸承電機中的鐵磁飽和基本上由兩種原因造成:一是產生懸浮力所需懸浮繞組電流的直接作用,二是產生轉矩所需的轉矩繞組轉矩分量電流的間接作用。由于無軸承電機氣隙磁場主要由轉矩繞組中勵磁分量電流產生,轉矩分量電流對飽和的間接作用實際是《軸交叉飽和的一種表現。
為考慮所示鐵磁非線性飽和后、通過氣隙磁鏈與轉矩繞組轉速分量電流的關系將以上氣隙磁場飽和的影響考慮進懸浮力模型,便可進行飽和對轉子懸浮影響的仿真研究。當負載由零突然過載一倍至lON.m時,轉子方向位移以及氣隙磁鏈的幅值與相位均發生變化,如所示。可以看出,由于々增大,轉矩繞組產生的氣隙磁場飽和,磁通幅值減小為原來0.81倍,相移超前0.15rad,致使氣隙磁場無法實現精確定向,轉子隙磁鏈定向基礎上,針對轉子參數變化、電機鐵磁飽和影響等因素,對定向用氣隙磁鏈大小、相位進行修正,尋找出一種優化的氣隙磁場定向方式,確保在大動態、過載下的完全解耦。
4優化氣隙磁場定向控制策略這是一種不同于標準氣隙磁場定向、需采用通用磁場定向控制器實現的新型動態定向解耦控制。通用磁場定向控制器原理框圖如0所示,控制器中定義了一個系數'、/“,通過選擇不同的值,可以靈活地選擇定向用磁通矢量*.表1中給出不同《值對應的磁通矢量。
運用通用磁場定向器的概念,可以對電機轉子參數變化、磁飽和影響等實際因素致使氣隙磁通矢量幅值及相位的變化進行處理;通過選取適當的值,動態地改變控制器的磁通矢量,實現氣隙磁鏈實時修正后的精確定向。
1給出了轉子電阻和漏感變化時氣隙磁鏈相位超前角的變化規律,圖中轉子每相電阻、漏感均為標幺值。可以看出,隨著轉子電阻的增大和漏感的減小,電機中實際的氣隙磁鏈會比選作的磁鏈矢量滯后,即偏向轉子磁鏈方向,如2所,J、2表示了通用磁場定向控制器中值的選擇與磁鏈相移角的關系。《<1時,隨著的減小,向轉子磁鏈矢量R方向移動,氣隙磁鏈相位變得滯后;(/>1時,隨著的增大,向定子磁鏈矢量方向移動,氣隙磁鏈相位變得超前。這個超前角正好可以用來抵消由于參數變化而引起的氣隙磁鏈相位偏移,使氣隙磁場重新達到準確定向。
2值與相位的影響采用類似方法可以實現針對鐵磁飽和影響的氣隙磁鏈幅值和相位的修正。一種考慮轉子參數變化和計及飽和影響的感應型無軸承電機優化氣隙磁場定向控制系統如3所示。圖中利用氣隙磁鏈值和由氣隙磁鏈觀測器獲得的實測值來實現幅值、相位的修正和通用磁場定向控制器參數值的選取。
3優化氣隙磁場定向控制系統框圖根據3的優化磁場定向控制模型,進行了過載條件下無軸承電機穩態和動態的仿真。以轉子參數變化為例,當轉子電阻增大為1.5倍、漏感減小20%時,氣隙磁鏈I//,相對于磁鏈I//:。會滯后5.16°(1),為修正這個相移偏差,通用磁場控制器選取了《=1.05.又由于這種變化使氣隙磁鏈增大了1.28倍,故幅值修正時氣隙磁鏈將縮小為原來的1/1.28.經過這種自動修正后的仿真結果如4所示。
4轉子時間常數減小、突加負載時優化氣障磁場定向控制仿真結果當負載由零突然過載至lON.m時,飽和現象明顯,經優化氣隙磁場定向控制方式修正后的轉子懸浮性能如5所示。由于優化氣隙磁場定向控制實現了對定向用氣隙磁鏈矢量的動態修正,有效地消除了轉子參數變化、鐵磁非線性飽和等實際因素對電機懸浮性能的影響,確實實現了大動態、過載下懸浮力的動態解耦。
5考慮鐵磁飽和時優化氣隙磁場定向控制仿真結果5結論無軸承電機實際運行中轉子參數的變化、磁飽和現象的影響,使得磁懸浮力不能完全解費,其原因是定向用氣隙磁鏈矢量出現了幅值及相位的偏差,本文對此現象通過仿真進行了深入的研究和分析,揭示了其中的規律。同時基于交流調速技術中通用磁場定向控制器的概念,提出了一種優化氣隙磁場定向控制策略及其控制系統,通過對定向用氣隙磁場幅值和相位的實時修正,實現了感應型無軸承電機大動態、過載下的動態完全解耦控制,使實際運行工況下無軸承電機仍能獲得懸浮力的理想解耦控制和轉子穩定懸浮運行,為實際系統的運行控制提供了實施途徑。

責任編輯:電小二
免責聲明:本文僅代表作者個人觀點,與本站無關。其原創性以及文中陳述文字和內容未經本站證實,對本文以及其中全部或者部分內容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關內容。
我要收藏
個贊
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題


-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-
《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
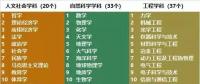
電氣工程學科排行榜發布!華北電力大學排名第二
-

國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
