
用調節次數較高的電動執行機構提高過程控制的精度
由于經濟增長速度的降低和全球競爭的加劇迫使所有的制造業都要降低成本和提高效率。節能、提高質量、減少排放的廢物是當前制造業提高效率和綜合效益所采取的某些措施。
簡單地說,通過安裝能達到0.5精度的先進的控制室系統。得到的效果很小,優化的控制策略由于現場儀表精度最好也只能達到5的精度抵銷了一切努力。控制設備制造商已經在控制回路的傳感器一側做出了重大的改進;而在控制回路的另一側即終端控制元件一側做出的改進就很少。
控制回路的穩定性、精度和效率取決于其最薄弱的環節,通常這個環節為終端控制元件。終端控制元件在它的尺寸、精度、工作范圍或調節速度任何方面一種不正確的選擇都會導致系統總效率的降低并且最終導致生產過程的故障。
常規的定位系統
終端控制元件通常都有一個氣動執行機構。它們都來自早期的氣動控制系統。當控制技術的發展由氣動到電動到數字的技術時,都保留氣動的執行機構。它被看作生產過程的一部分而不是控制回路的一部分。只有它們的接口設備(定位器)隨著技術的進步而發展。
慢慢地控制工程師認識到執行機構才是控制元件;而接口設備并非控制元件,正在要求高精度定位以響應控制信號。
氣動執行機存在固有的弱點。空氣或者氣體的可壓縮性和摩擦是氣動定位系統不可避免的弱點。執行機構要運動就需要克服摩擦。這還不是一個大問題。問題是由于在開始運動的靜摩擦和運動時的摩擦系數之間有較大的差別。這種摩擦系數的大小取決于填料、閥桿和工藝過程的負荷。需要更大的執行機構的力來克服摩擦。這將導致閥位階躍地變化。這種階躍的程序決定了執行機構的定位分辨率。
閥門制造商們已經采取步驟通過采用光潔度較高的閥桿、摩擦較小的填料和智能的定位器以降低“跳動效應”。然而客觀存在著緊密的填料、工藝過程的負荷和閥桿的摩損和積垢并且它們會明顯地使摩擦增大。
對于帶典型的活塞執行機構的2英寸行程的閥,執行機構的跳變為0.15英寸或行程的7.5。在控制儀表系統要求精度達到0.5的情況下,這種“跳動效應”由于定位器受到較大的不平衡力很容易引起振蕩,生產過程和調節器須要不斷地進行位置校正。
其它定位系統
為了克服氣動執行機構的弱點,合乎邏輯的解決辦法是采用不可壓縮的流體。這樣曾產生了液壓系統。盡管它們解決了氣動執行機構所遇到的“跳動”問題,但是它們還有其它固有的特點。
液壓系統比氣動系統貴3到10倍,比氣動系統需要更多地維護并且會受到冷凝液和特殊介質的污染需要經常地監視和維護。而液壓系統主要的特點是有可能由于液壓管線和液壓缸密封的斷裂或泄漏而造成環境的污染。
隨著技術的進步由于采用了執行機構自備的液壓系統已經提高了液壓執行機構的可靠性。執行機構的定們仍然會影響到液壓缸和密封,可能會發生污染環境的泄漏并且要付出較高的維護費用。
電動定位系統
具有較高調節性能的電動終端控制元件的采用將會改變這一切。電動的終端控制元件很快就變成了最可靠的和實現優化目標的精確方法的一種選擇。電動執行機構有一些超過傳統的氣動或液動控制元件特有的優點。它們是:
■與電動的或數字的控制系統直接地兼容
■能效高,能耗低
■滯后小甚至沒有滯后
■降低了維護的要求
■安裝和操作費用較低
■不需要外加的壓縮機或液壓能源
電動執行機構已經能夠滿足控制室系統和它的儀表系統嚴格的精度要求。
為了實現這種精度要求,電動執行機構要不斷地重新定位從而達到由系統儀表所傳送的所預期的終端位置。為滿足了這種調節的要求,確定電動執行機構的技術規格就變成了要確定每小時啟動的次數(SPH)。
當馬達啟動時它要流過較大的電流,這樣就產生熱。如果頻繁啟動就足以使馬達發熱。SPH就是防止馬達過熱所允許的最多的定位動作。
具有較高SPH的執行機構使控制回路能夠更加接近地跟隨過程變量(給定值—譯者注)。但是對SPH的要求多高才能符合控制室系統的要求呢?一種簡單地圖形分析方法有助于回答這個問題。
圖形分析
比如說執行機構正在控制擋板或閥門。當過程變量沒變化時執行機構仍舊處在它原來的位置或0點。現在我們為了分析問題假定過程變量以Rc的速度變化。為了使分析問題更為方便,假定這種變化速度是恒定的并且也是一致的。控制回路儀表系統會命令執行機構如圖1所示跟隨過程變量運動。
當過程變量變化時,執行機構仍會保持在它的零位置直到變化大到超過死區Db時為止,或者由圖1中的Db/Rc點所批示出的伺服放大器的靈敏設定值為止。
由此點執行機構會啟動運動到它的命令位置。因為過程不斷地改變執行機構零點的位置會變為圖1中的X1。執行機構達到新的零位所用的時間是由過程變化的速度和執行機構的速度或者說已知的移動時間所確定的。速度較慢的執行機構就很難精確地控制生產過程。
當過程變量不斷地改變時這種作用就會反復出現。對執行機構會仍舊停留在零位直到變化大于死區,然后它會開始移動達到它新的命令位置。
圖2表示執行機構在一段時間內動態過程的響應曲線。在命令位置線和執行機構響應線之間的距離是在過程中由實際計時而得到的偏差,它會累積并且不能夠予以補償。執行機構響應曲線的回歸分析會得到由此過程和執行機構的動態特性所產生的那種可以被稱為持久或動態誤差的曲線。用具有較高SPH的執行機構減小的正是這種誤差。
在執行機構命令位置和動態誤差曲線之間的差就成為在此種工藝過程條件下執行機構所予期的最高精度。
定量分析
■為了得到執行機構最高精度數量級的概念,我們假定:
■工藝過程的變化速率為Rc單位是每秒百分之幾
■死區設定為Db單位
■執行機構移動的時間St單位秒
■執行機構命令點由RcX得到,其中X為時間單位為秒
■執行機構實際位置由100/StX—N(100Db/StRc);式中N為啟動的次數。
然后用這些數據可以作出在市場最常見的執行機構SPH的響應曲線。在不超過所給出執行機構的SPH的情況下,用這組數據還可以計算出一組過程變量盡可能小的死區。
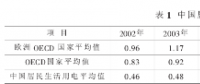
對最普通的可以使用的執行機構的SPH在幾組不同的工藝過程條件下做了進一步的分析。這些計算的結果如表1所示。如所看見的和予期的那樣,其精度并未隨著工藝過程條件的變化而產生明顯的變化,它是執行機構的固有的特性。
結論
執行機構有一個固有的最高精度。由電動執行機構緊密跟蹤過程變量的能力來確定這種最高精度。
這種能力由已知的執行機構的每小時啟動次數(SPH)來確定。它是執行機構在溫度不超高的情況下所啟動的最高次數。
調節次數高的電動執行機構,SPH為2000或2000以上的執行機構,有能力與以微處理器為基礎的控制系統和先進的策略精確地兼容,而這些系統和控制策略正是當前過程工業所普遍應用的。這些調節次數高的執行機構的應用能實現當前工業過程對高性能回路的要求,這也證明了用來增加過程精度和性能的投資是正確的。
調節次數高的電動執行機構的另一項好處是降低業主的成本。由于調節次數高的電動執行機構需要比較堅固的組成部分,這樣就能在許多年之內無故障地運行,這樣與其它類型定們系統或調節次數低的電動執行機構相關的運行中的維修費用就降低了。

責任編輯:電力交易小郭
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題


-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-
《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
電氣工程學科排行榜發布!華北電力大學排名第二
-

國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
