地鐵制動能量回饋兆瓦級雙饋逆變器的控制策略
廈門科華恒盛股份有限公司的研究人員蘇先進,在2018年第3期《電氣技術》雜志上撰文指出,雙向饋能邏輯及其控制策略是兆瓦級地鐵制動能量回饋裝置的關鍵部分,其設計合理性影響地鐵制動能量的回饋及運行可靠性。
分析了雙饋逆變器在牽引網電壓處于逆變啟停、整流啟停等不同電壓時的能量流向;采用帶中點電位平衡的三相SVPWM控制實現逆變饋能并網,電壓環為限幅PI控制器,電流環為帶電網電壓前饋的PI控制器,有效提高系統可靠性及抗干擾能力;為抑制校正電感電流采樣及無功補償偏差,進行限功率控制,實現功率因數校正。
最后,通過一臺額定功率1MW(峰值功率2MW)、適用于2MW制動能量地鐵機組的實驗樣機驗證了雙向饋能邏輯及其控制策略的可行性。
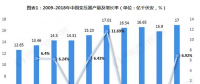
我國軌道交通隨城市化進程快速推進,“十三五規劃”期間新增城市軌道交通運營里程約3000km、總投資超5000億[1]。如何有效利用能耗對軌道交通的節能減排有重要經濟及社會效益[2,3]。
軌道機車制動能量吸收設計方案主要包括電阻耗能型[4]、電容儲能型[5,6]、飛輪儲能型[7]和逆變回饋型[8,9]四種方式。針對地面電阻耗能型存在散熱及征用地的問題,文獻[4]采用車載電阻耗能吸收方案實現深圳地鐵2號線列車制動;采用電阻耗能方式使隧道溫度上升、制動能量無法回收。
文獻[5]、[6]給出了超級電容作為制動能量存儲媒介,通過雙向變流設備將制動能量回收,機車啟動時將制動能量釋放;飛輪作為儲能媒介時與電容儲能為同一機理。超級電容成本高、飛輪體積大,無法良好適應軌道交通的發展。為此,具備節能環保及成本優勢的逆變回饋技術成為地鐵制動能量吸收的發展趨勢[8,9]。
現有文獻主要依據模型仿真及實驗進行地鐵制動能量回饋模擬,如文獻[10]給出了DSP上弱電回路地鐵制動能量回饋控制的基本邏輯;文獻[11]依據仿真平臺對三相逆變地鐵制動能量回饋裝置進行仿真設計,并給出24V直流系統實驗模型。小功率實驗及仿真模擬在實際大功率地鐵制動運用中具有參考價值,但存在控制時序不精確等局限性。
本文給出了基于三電平逆變拓撲輸出功率達2MW的地鐵制動能量回饋控制邏輯及控制策略,并給出了相應的實驗結果。
1 雙饋逆變器控制系統
1.1 地鐵列車供電分析
軌道交通列車采用直流牽引供電,安全性與可靠性是城市軌道交通的根本,因此整流機組采用技術可靠的24脈波二極管整流方案實現。二極管的單向導電特性,使得列車在電制動時反饋到直流牽引網的能量無法回饋到電網,引起電壓攀升,因此需要配置回饋裝置抑制電壓攀升,使列車安全運行。
圖1 列車制動功率與直流網壓的關系
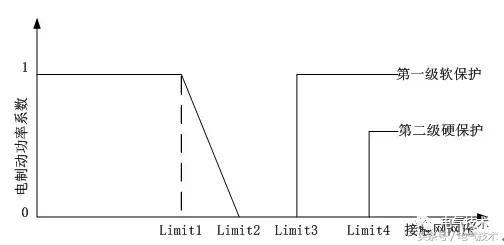
如圖1所示,列車在1500V至1800V的網壓條件下運行時,其牽引系統的電制動能力可以正常發揮,當網壓超過limit1(1800V)時,其電制動能力將隨網壓的升高而線性地下降,直至電壓升高到limit2(1950V),電制動能力降為0,如果接觸網網壓繼續升高到limit3(2050V)時,牽引系統控制單元將封鎖IGBT驅動,進行第一級軟保護,當網壓繼續越升至limit4(2100V)時,牽引系統將切斷其供電主回路的高速斷路器,進行第二級硬保護。
由此可知,需將直流網壓抑制在1800V以內。根據寧波地鐵實測數據,列車在無任何吸收的情況下,直流牽引網壓將在300ms內攀升至2100V。
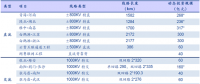
整流機組帶有下垂特性,根據廣州地鐵九號線數據,負載為0.5%Ie,電壓不超過1650V;100%Ie電壓不超過1500V;300%Ie電壓不低于1320V。
綜上分析,考慮到列車吸收、接觸網阻抗以及避免與整流機組構成環流,一般回饋啟動電壓點設置為1700左右。考慮到裝置不會頻繁啟動整流功能,將整流啟動電壓點設定為1500V,在列車牽引時,將下垂的電壓拉回至1500V。
1.2 系統模型分析
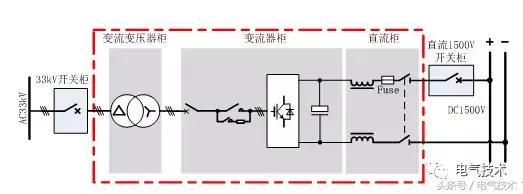
圖2給出了本文設計的地鐵制動能量回饋裝置的功率回路原理圖,系統由直流柜、變流器柜、變壓器柜三部分組成。直流牽引網通過直流1500V開關、隔離開關以及電抗器送到變流器柜輸入,經過三相半橋逆變單元將制動能量的直流電轉換成交流電,再通過升壓變壓器升至33kV并入中壓電網。
圖2 系統功率回路原理圖
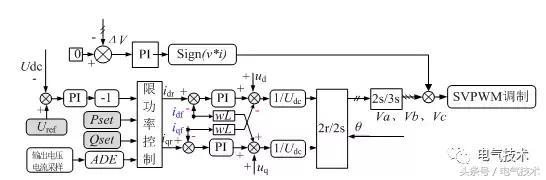
系統控制拓撲如圖3所示(接觸器、斷路器不參與閉環控制,這里省略),前級掛接牽引網,額定電壓1500V,在地鐵運行期間直流母線電壓隨地鐵啟動和制動而波動。系統控制主要包括:并網電流控制(含孤島擾動、直流分量控制)、電壓控制、限功率控制、鎖相控制、中點電位平衡控制以及SVPWM調制。
圖3 系統拓撲及控制結構
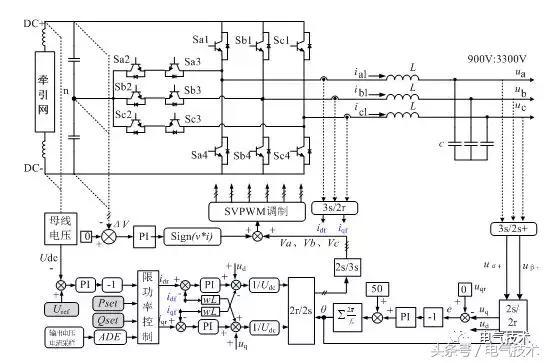
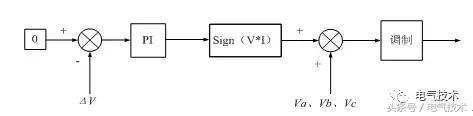
圖3中網絡標識符說明:Uref電壓環給定值,Udc為母線電壓反饋值,ΔV為正負母線電壓差;Sign(v*i)為三相調制波分別和該相電流乘積正負符號;Va、Vb、Vc為三相調制波;Sa1~Sc4為驅動信號;Pset和Qset為有功功率和無功功率設置值;ADE指電能芯片負載輸出有功和無功采樣并傳送給控制芯片,用于限功率控制;id_island\iq_island為孤島擾動給定;id_dc\iq_dc為直流分量控制給定;idr和iqr為限功率控制后的電流環dq給定;idf和iqf為電感電流反饋dq值;wL為電流d值和q值之間的解耦系數(w為角速度);ud和uq為電壓前饋dq值;uqr為鎖相環給定值。
1.3 雙向饋能控制邏輯
定義:Urec_start為大整流啟動電壓(1300V~1500V可設置);Urec_stop為大整流停止電壓(1500V~1550V可設置);Uinv_stop代表大逆變停止電壓(也叫饋能停止電壓,1550~1650V可設置);Uinv_start表示大逆變啟動電壓(也叫饋能啟動電壓,1650~1950V可設置);Uref為電壓環給定值(1500~1600V可設置)。
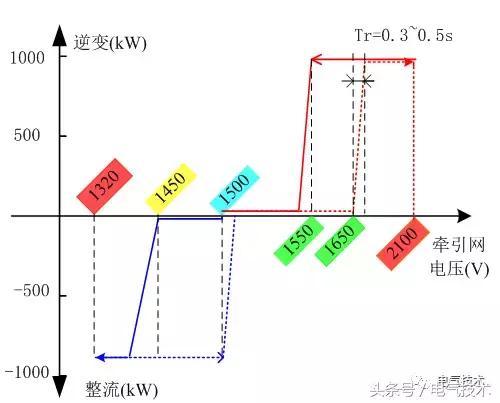
正常運行過程中,如:Urec_start=1450V;Urec_stop=1500V;Uref=1500V;Uinv_stop=1550V;Uinv_start=1650V,牽引網過壓保護點2100V,欠壓保護點1320V,能量流向與牽引網電壓關系曲線如圖4所示。
饋能啟動后,電流達到額定電流時間設置300~500ms,根據現場工況設置,各啟動、停止點電壓的檢測濾波時間均為10ms。
圖4 能量流向與牽引網電壓關系曲線圖
1.4 逆變饋能控制策略
1.4.1 改進數字鎖相環
基于d-q變換的改進數字鎖相環如圖5所示,DSP先對三相電壓采樣值ua(k)、ub(k)和uc(k)進行3s/2s變換處理得到uα和uβ,按等功率Clarke變換可得三相電壓在兩相靜止坐標系下正序分量[12]:
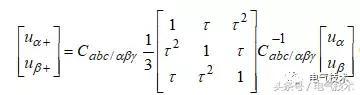
(1)
圖5改進數字鎖相環
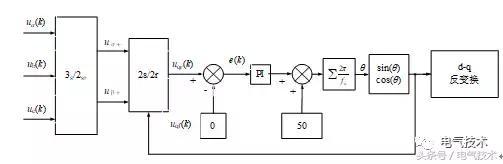
其中,正序分量可由電網通過數學變換、移相得到:實軸部分通過50Hz帶通濾波器G0(s),濾除其他各次諧波;虛軸部分通過50Hz移相濾波器G90(s)進行90°滯后相位,同時濾除高頻干擾。
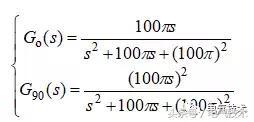
(2)
按照采樣頻率1.5kHz,雙線性z變換方法,對以上傳遞函數離散化處理可得:
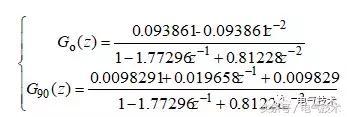
(3)
由(1)關系得到式(3)數字濾波器,對uα和uβ分別移相、濾波和換算得到uα+和uβ+;對uα+和uβ+進行2s/2r變換處理得到uqr(k)和udr(k)。uqr(k)作為鎖相環給定值其反饋值始終設置為0,通過PI控制器得到頻率值加上內部基準頻率(50Hz)即可做為實時跟蹤頻率;已知開關頻率fs積分求得實時的相位角θ,而sin(θ)和cos(θ)既是內部閉環信號,也作為三相電壓d-q反變換的基準信號。
1.4.2 中點電位平衡控制
空間電壓矢量脈寬調制(SVPWM)算法在三電平逆變器中包含27種開關狀態、19個電壓矢量,按照傳統方式實現三電平SVPWM調制需要使用大量條件判斷,占用較多CPU資源且邏輯復雜。
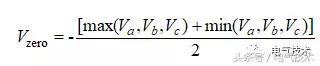
SVPWM本質上可以看作是正弦波疊加零序分量,并采用中心對稱規則采樣的載波調制。且疊加零序分量的載波調制(CBPWM)并不需要如同SVPWM方法進行大量數學運算,因此采用疊加零序分量的載波調制。SVPWM等效的CB-PWM疊加的零序分量Vzero為:
(4)
Va,Vb,Vc為三相正弦調制波,max()為取最大值函數,min()為取最小值函數。
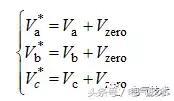
(5)
SVPWM調制三電平對母線電容充放電時,使中點電位偏移。采用SVPWM方法,通過分配流入中點電流相反的冗余小矢量的作用時間來控制中點電位平衡。CB-PWM同樣可疊加零序分量來控制中點電位,根據載波及電流方向,判斷出所需注入零序分量方向,控制框圖如圖6所示。
圖6 中點電位控制
1.5 電壓、電流環及限功率控制算法
圖7給出了系統電壓控制示意圖,電壓環使用PI控制器,令母線電壓跟隨電壓給定值Uref,電壓環輸出作為電流環的給定值。電壓閉環給定值分兩種:緩啟動給定值和正常運行給定值、穩壓饋能和牽引網模式。穩壓饋能和牽引網模式適用于調試階段使用。
圖7系統的電壓控制

緩啟動:母線電壓從0V開始由輔助接觸器吸合緩沖,再由主接觸器吸合緩沖,最后啟動反向整流跟蹤牽引網電壓。
正常運行:電壓環給定 1500V~1600V可設置,正常情況下牽引網電壓高于停止電壓且低于啟動電壓(1650V~1950V可設)。本系統對電壓環的PI輸出會做相應限幅處理,滿足現場應用需求:當牽引網電壓在啟動電壓和停止電壓之間時,通過限制電壓環輸出限幅值來禁止逆變饋能,允許反向整流。當列車制動引起電壓抬升到啟動電壓及以上,通過放開電壓環限幅來啟動逆變饋能,并在電壓重新下降到停止電壓時禁止逆變饋能。
地鐵現場要求牽引網電壓大于啟動電壓后饋網功率從0到額定功率所需時間300ms~500ms,為保證饋網功率變化速率可控,對電壓環PI輸出進行限幅。PI限幅按固定步長遞增或遞減,步長根據設置的滿載饋能響應時間Tr、系統開關頻率fs以及額定電流Ir換算,電壓環PI輸出限幅變化步長為:
(6)
電壓環PI系數選擇必須滿足現場需求,積分環作用快慢跟Ki系數、啟動電壓和停止電壓均有關系。以最小的啟動電壓1650V,最高的電壓環給定1600V為計算依據,只要保證電壓環PI輸出變化速率大于300ms滿載饋能響應時間對應的限幅變化步長Istep(300ms)=(1111.0/(1500*0.3))=2.47即可。
圖8給出了三相并網電流控制框圖,由電壓給定經過電壓PI調節器的輸出加上有功設置值Pset限幅后作為電流d值給定,同理電流q值給定由系統設置的無功Qset值決定;idf和iqf為電感電流反饋dq值,通過wL解耦系數進行解耦控制;電流環PI控制器輸出后疊加電網電壓前饋ud和uq,以提高系統對電網波動的抗擾性。
圖8 并網電流控制框圖
功率控制環實現輸出期望的功率,便于測試不同功率段性能指標。功率控制環是根據地鐵工況設置的功率對并網電流進行閉環限幅,使輸出功率精度滿足要求1%。有功、無功電流限幅式子如下:
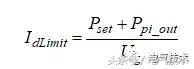
(7)
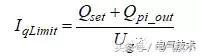
(8)
式中,Pset、Qset為用戶設置的有功功率和無功功率,Ppi_out、Qpi_out為電能芯片ADE7878實時計算的功率閉環調節輸出,Ug為電網線電壓有效值,限功率控制環路框圖如下:
圖9 限功率控制環路框圖
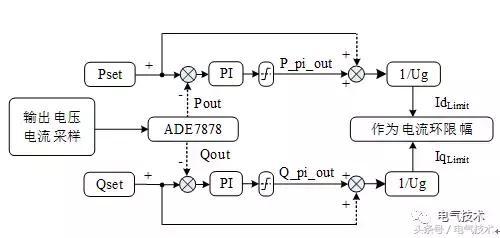
由上圖可知,電流環限幅主要由Pset/Ug和 Qset/Ug決定,限功率環PI控制器起到微調作用。在電感電流采樣準確、濾波電容無功補償準確的情況下,限功率控制環PI控制器輸出為0,電流限幅直接等于Pset/Ug和Qset/Ug。
實際因電感電流采樣偏差、無功補償不到位,就需要PI控制器對電流限幅進行微調,ADE7878作為電能計量芯片,具備較高的采樣精度,因此可用于校正功率。
2 實驗結果與分析
為驗證所提出的控制方法,研制了一臺峰值功率變換2MW、適用于2MW制動能量地鐵機組的雙饋變流設備,逆變并網試驗波形如圖10所示。
圖10 2MW饋能并網實驗波形
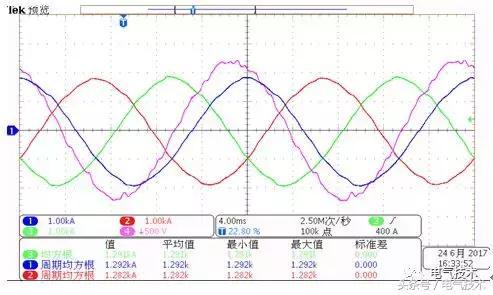
其中通道4為并網AB線電壓900V,通道1~3分別為A、B、C三相電流,此時逆變饋網總功率為2MW。
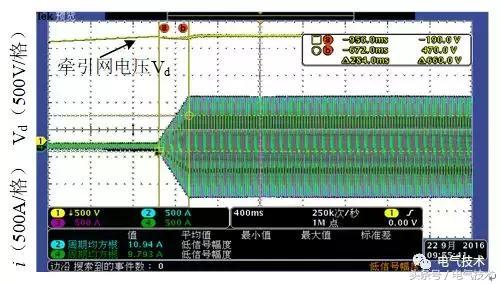
地鐵制動饋能實際工況過程如圖11(a)所示,設置整流啟動電壓Urec_start=1450V、整流停止電壓 Urec_stop=1500V、電壓環電壓給定值Uref=1500V、饋能啟動電壓Uinv_start=1650V,饋能停止電壓 Uinv_stop=1550V。中通道1為牽引網電壓,通道3為A相輸出電流,地鐵制動饋網能量為2WM。
(a) 地鐵制動及牽引網電壓平衡動態過程

(b) 大逆變饋能啟動過程
(c) 大逆變停止過程
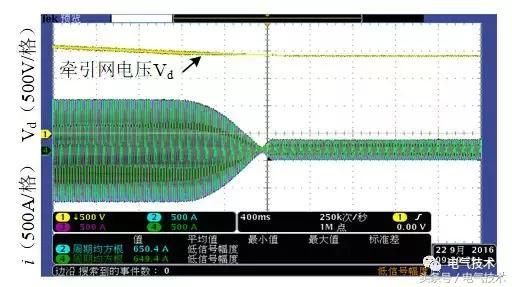
圖11地鐵制動能量回饋動態過程
圖11(b)當牽引網電壓逐漸抬升到1650V后輸出電流在300ms內遞增到1WM制動滿載電流,變流器實現逆變饋能。
圖11(c)當牽引網電壓逐漸下降到1550V時,大逆變停止,輸出電流幅值逐漸減小,因大逆變停止的限幅漸變速度較慢,電流減小速度明顯小于遞增速度。當牽引網電壓繼續跌落到大整流啟動點1450V時,大整流啟動。
因電壓環退積分速度和輸出限幅,裝置需要一段時間才能轉入整流狀態。牽引網電壓逐漸恢復到大整流停止點以上,大整流停止,整流電流逐漸遞減至小整流電流值,維持牽引網電壓平衡。
為驗證限功率控制功能,分別測試不同Pset、Qset以及PF設置值對應功率分析儀WT1800測量的實際值,并計算偏差量。如下表1~表3。
表1 Pset設置值與實測值對比
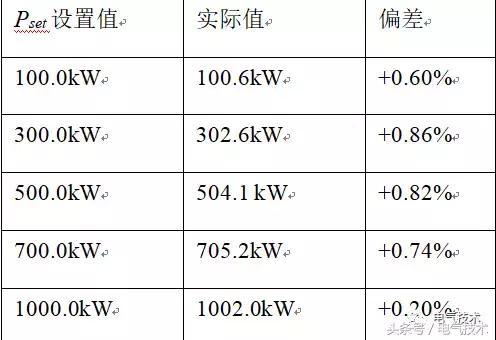
表2 Qset設置值與實測值對比

表3 PF設置值與實測值對比

綜合以上實驗數據可知通過限功率控制可使輸出有功功率、無功功率以及PF控制在預期精度內,以滿足設計需求。
3 結論
依據2MW地鐵制動能量回饋實際工況,給出了一種地鐵制動能量回饋控策略及控制時序方案,并在一臺額定功率1MW(峰值功率2MW)的雙饋變流裝置得到驗證,提出的方法可有效回饋軌道交通的制動能量。

責任編輯:售電衡衡
-

權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -

中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網
-

新基建助推 數據中心建設將迎爆發期
2020-06-16數據中心,能源互聯網,電力新基建 -

泛在電力物聯網建設下看電網企業數據變現之路
2019-11-12泛在電力物聯網 -

泛在電力物聯網建設典型實踐案例
2019-10-15泛在電力物聯網案例



-
權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -
中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

能源革命和電改政策紅利將長期助力儲能行業發展
-
探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網 -

5G新基建助力智能電網發展
2020-06-125G,智能電網,配電網 -

從智能電網到智能城市