配網架空輸電線路無人機綜合巡檢技術
摘要:為滿足配電網架空線路巡檢應用需求,提出了基于小型無人直升機平臺的配網架空線路綜合巡檢技術。提出無人機綜合巡檢平臺的構建方法,研究確定無人機搭載的可見光、紅外、紫外及超聲波傳感器、特高頻傳感器等綜合巡檢模塊的配置要求。測試結果表明,無人機巡檢系統的適應環境溫度為–20~45 ℃,最高海拔高度為2 000 m,抗風能力為7 m/s;懸停控制精度的垂直方向為±0.5 m、水平方向為±1.0 m,能精確定點近距離巡檢桿塔。對于可見光傳感器,有效像素數為1 200萬,具備變焦和自動對焦功能;對于紅外傳感器,有效像素數為30萬,具備自動對焦功能。提出的小型無人直升機綜合巡檢技術可應用在配網架空線路巡視和檢測,以提升配網線路巡檢的自動化和智能化水平。
關鍵詞:配網架空輸電線路 無人機綜合巡檢 傳感模塊 環境適應性 巡檢功能
本文轉載自《中國電力》雜志 2018年 51卷 1期
引言
近年來,隨著遙感、自動控制、信息處理、圖像識別等新技術快速發展,無人機技術在鐵路、交通物流、農業植保、石油化工等行業獲得了廣泛應用[1-2]。與此同時,電力行業也在不斷探索無人機巡檢技術研究和應用[3-6]。
國家電網公司自2011年開始探索“直升機、無人機和人工協同巡檢”應用。2013年年初,在公司系統內選取10個省(地市級公司)開始為期3年的協同巡檢試點應用工作。2016年至今,正在開展無人機巡檢推廣應用[7-8]。
總體而言,配電網設備運維效率和技術水平不足,配電網設備停電試驗項目很少,日常巡視是主要的設備狀態管控手段[9-10],運維人員對于有效且高效的巡檢手段需求較為迫切。目前,搭載可見光、紅外、紫外傳感器等檢測設備的無人機巡檢系統已應用于主網輸電線路設備本體、附屬設施和通道環境巡視檢查和檢測工作。在配電網線路巡檢方面,由于配電網設備和系統結構復雜、鄰近人口密集用戶區等影響因素制約,基于無人機巡檢技術在配電網架空線路中的應用還未見相關報導。
1 無人機綜合巡檢平臺構建
1.1 無人機選型
目前應用于電網巡檢的無人機按照平臺進行分類,主要包括固定翼無人機、大中小型無人直升機(多為電動多旋翼)。固定翼無人機具有飛行速度快(大多數在100~200 km/h)、續航時間較長、作業范圍廣等優勢,缺點是無法進行定點懸停觀測、照相,起降條件要求較高。目前成熟可靠的大、中型無人直升機產品較少,應用的比較多的是美國Copterworks公司生產的AF25b型直升機,該機動力為雙缸汽油發動機,起飛質量32 kg,載荷11 kg,續航時間約1 h;相對于電動多旋翼無人機,該機優點是載荷大、續航時間長,缺點是維護操作較復雜且攜帶不方便。電動多旋翼無人機集成技術難度較低,國內生產廠家較多,具有成本低、便攜性好、集成度高、維護保養簡單等優勢,缺點是載荷小、巡航時間短。
由于配網系統具有設備眾多、設備間距較小、系統結構復雜、經過地區多為城鎮人口密集地區等特點,應用于配網線路無人機巡檢系統應滿足如下要求:(1)經常在人口密集區作業,情況復雜,因此要求配網無人機巡檢系統有很高的可靠性,機體尺寸較小、起降方便、墜機風險較低;(2)一般都在公路通達的巡檢點附近,因此大都要求目視控制飛行,對于測控距離要求較低,一般2 km距離足夠,單次作業時間也不會太長,一般≤30 min;(3)巡檢方式多樣性,要求能夠搭載可見光、紅外光觀測能力,特殊條件下能夠開展紫外、超聲波、特高頻傳感器等多種巡檢設備;(4)較強的環境適應性,攜帶方便,便于作業迅速展開。
因此,綜合以上分析建議選擇小型無人直升機(以下簡稱為無人機)開展配網架空線路無人機綜合巡檢作業。
1.2 無人機結構設計與分析
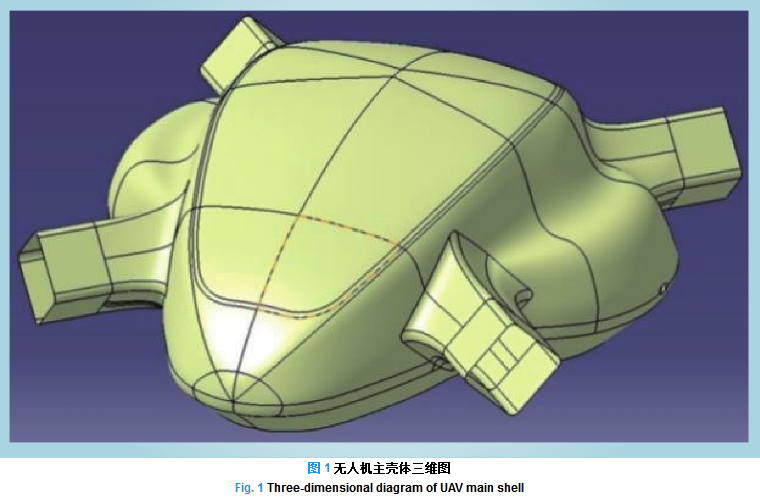
(1)無人機殼體設計。由于配電網無人機巡檢工作環境變化較大,并且可能碰到比較惡劣的天氣,則需研究無人機殼體的非常規空氣動力學特性,且從一定程度上保證無人機的性能、操縱性和穩定性,設計出具有一定流線型的無人機外殼,如圖1所示。主殼體具有較好的流線型,在飛行過程中阻力更小,所需動力就更小,在相同電池容量的情況下,續航時間更長。
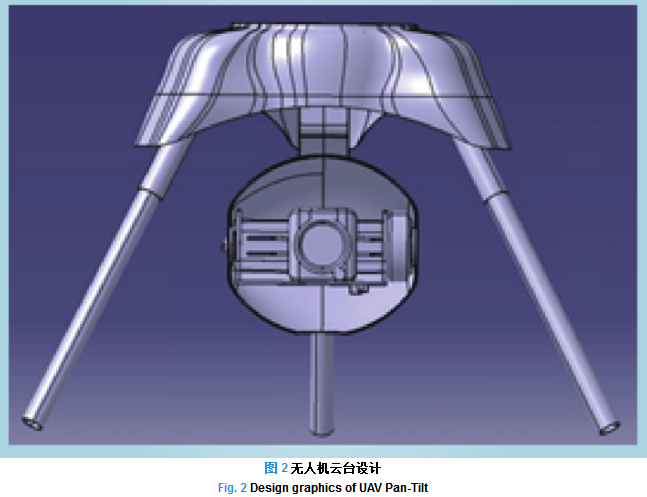
(2)無人機云臺設計。電動多旋翼無人機用來搭載任務設備的主要是云臺,設計了三軸增穩云臺,如圖2所示,用于在無人機自主飛行、低空作業的同時,保證數字航空影像的拍攝質量。云臺搭載的載荷設計采用插拔式連接方式,安裝拆卸方便,便于操作。設計的云臺可以實現至少水平和俯仰2個方向的轉動性能。
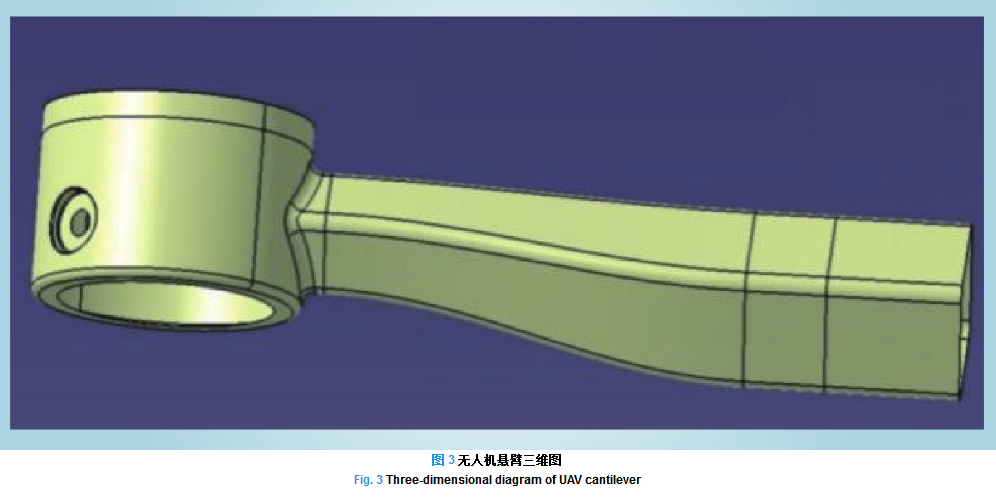
(3)無人機懸臂設計。電動多旋翼無人機的運動和簡單結構都依賴于螺旋槳及時的速度改變,以調整力和力矩,設計無人機懸臂如圖3所示。
1.3 無人機平臺結構仿真分析
懸臂結構是支撐云臺、任務設備及整個機架的關鍵部位,必須保證其良好的結構強度。為驗證懸壁結構在懸停工作狀態下的變形情況,采用ANSYS有限元軟件對懸壁結構進行分析。工作狀態應力分布如圖4所示,無人機旋翼的流體分析、定速分析分別如圖5和圖6所示。
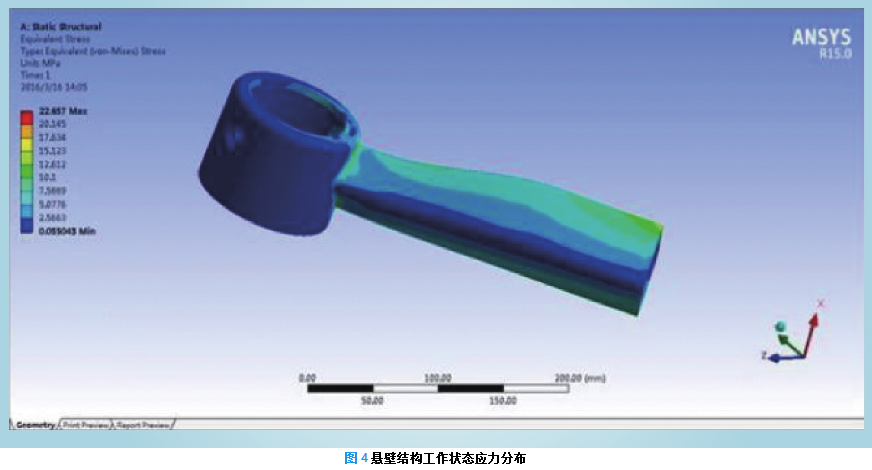
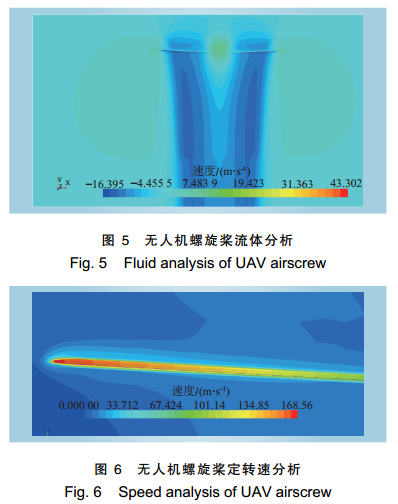
由圖4~圖6可知:(1)懸臂工作狀態時,應力分布均勻,應力最大值為20.125 N/mm,應力值滿足空氣動力學特性;(2)螺旋槳在工作轉速的狀態下,流場分布均勻,飛行良好;(3)螺旋槳處于懸停的狀態下,槳尖部位空氣流速最快,可達到168 m/s左右,槳葉附近空氣流動處于湍流狀態,槳葉整體飛行運動狀況良好。

責任編輯:電朵云
-

權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -

中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網
-

新基建助推 數據中心建設將迎爆發期
2020-06-16數據中心,能源互聯網,電力新基建 -

泛在電力物聯網建設下看電網企業數據變現之路
2019-11-12泛在電力物聯網 -

泛在電力物聯網建設典型實踐案例
2019-10-15泛在電力物聯網案例



-
權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -
中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

能源革命和電改政策紅利將長期助力儲能行業發展
-
探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網 -

5G新基建助力智能電網發展
2020-06-125G,智能電網,配電網 -

從智能電網到智能城市